ಕೈಗಾರಿಕಾ ಉತ್ಪಾದನೆಯು ಆರ್ಥಿಕ ಮತ್ತು ಸಾಮಾಜಿಕ ಅಭಿವೃದ್ಧಿಯನ್ನು ಉತ್ತೇಜಿಸುವ ಪ್ರಮುಖ ಕೊಂಡಿಯಾಗಿದೆ. ಪ್ರಸ್ತುತ, ಸ್ವಯಂಚಾಲಿತ ವೆಲ್ಡಿಂಗ್ ಉಪಕರಣಗಳ ಮೇಲಿನ ಸಂಶೋಧನೆಯು ಆಳವಾಗುತ್ತಿದೆ ಮತ್ತು ಕಾಂಕ್ರೀಟ್ ಆಗುತ್ತಿದೆ, ಇದು ವಿವಿಧ ರೀತಿಯ ವೆಲ್ಡಿಂಗ್ ರಚನೆಗಳ ಉತ್ಪಾದನೆಯಲ್ಲಿ ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲ್ಪಡುತ್ತದೆ.
ಸ್ವಯಂಚಾಲಿತ ವೆಲ್ಡಿಂಗ್ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ, ವೆಲ್ಡಿಂಗ್ ಅಸೆಂಬ್ಲಿ ಅಂತರ ದೋಷದ ಒಂದು ನಿರ್ದಿಷ್ಟ ಮಟ್ಟಿಗೆ ಬುದ್ಧಿವಂತ ಮತ್ತು ಡಿಜಿಟಲ್ ಸಮಂಜಸ ನಿಯಂತ್ರಣ, ಈ ಆಧಾರದ ಮೇಲೆ, ವರ್ಕ್ಪೀಸ್ ಸ್ಥಾನ ವ್ಯತ್ಯಾಸ, ವರ್ಕ್ಪೀಸ್ ಜಂಟಿ ವಿಚಲನ ಮತ್ತು ಇತರ ಅಂಶಗಳನ್ನು ಸಹ ಪರಿಗಣಿಸಬೇಕು. ಆದ್ದರಿಂದ, ಲೇಸರ್ ವೆಲ್ಡಿಂಗ್ ಸೀಮ್ ಟ್ರ್ಯಾಕಿಂಗ್ ತಂತ್ರಜ್ಞಾನವು ವೆಲ್ಡಿಂಗ್ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಪ್ರಮುಖ ಪಾತ್ರ ವಹಿಸುತ್ತದೆ.
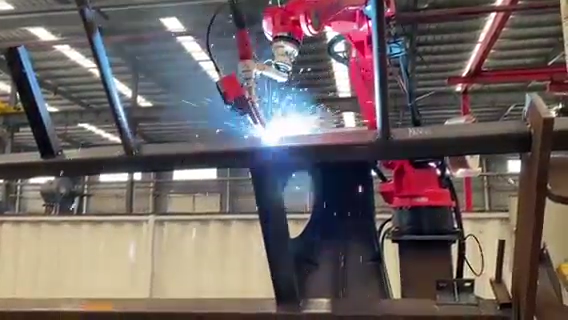
ಸಿಮೆಂಟ್ ಟ್ಯಾಂಕ್ ಕಾರ್ ಕಾರ್ ಬೇಸ್ ವೆಲ್ಡಿಂಗ್ ಲೇಸರ್ ವೆಲ್ಡಿಂಗ್ನೊಂದಿಗೆ ಏಳು ಅಕ್ಷದ ಭೂ ಕಕ್ಷೆ ಎಂಟು ಅಕ್ಷದ ತಿರುಗುವಿಕೆ
- ವರ್ಕ್ಪೀಸ್ನ ಸ್ಥಾನವು ಬಹಳ ವ್ಯತ್ಯಾಸಗೊಳ್ಳುತ್ತದೆ
- ವರ್ಕ್ಪೀಸ್ ಸಂಪರ್ಕದಲ್ಲಿ ವಿಚಲನವಿದೆ
- ಹೆಚ್ಚಿನ ವೆಲ್ಡಿಂಗ್ ನಿಖರತೆಯ ಅಗತ್ಯವಿದೆ
- ಕಳಪೆ ವೆಲ್ಡಿಂಗ್ ಪರಿಸರ ಮತ್ತು ಹೊಗೆ
ಈ ಸಂದರ್ಭದಲ್ಲಿ, Yooheart ಬುದ್ಧಿವಂತ ರೋಬೋಟ್ HY1006A-145 ಅನ್ನು ಲೇಸರ್ ವೆಲ್ಡಿಂಗ್ ಸೀಮ್ ಟ್ರ್ಯಾಕಿಂಗ್ ಸಿಸ್ಟಮ್ನೊಂದಿಗೆ ವೆಲ್ಡಿಂಗ್ಗಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ, ಇದು ಹೆಚ್ಚಿನ ನಮ್ಯತೆ, ಸ್ಥಿರತೆ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹತೆಯನ್ನು ಹೊಂದಿದೆ.
ಪ್ರತಿ ವೆಲ್ಡಿಂಗ್ ಮಾಡುವ ಮೊದಲು, ಉಪಕರಣವು ಮೊದಲು ವೆಲ್ಡಿಂಗ್ ಸೀಮ್ನ ನಿರ್ದೇಶಾಂಕವನ್ನು ವೆಲ್ಡಿಂಗ್ ಸೀಮ್ ಲೊಕೇಟಿಂಗ್ ಮೂಲಕ ಸ್ಕ್ಯಾನ್ ಮಾಡಿ ದಾಖಲಿಸುತ್ತದೆ, ಮತ್ತು ನಂತರ ಆಂತರಿಕ ಅಲ್ಗಾರಿದಮ್ ಮೂಲಕ ನಿರ್ದೇಶಾಂಕ ಆಫ್ಸೆಟ್ ಅನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡುತ್ತದೆ ಮತ್ತು ಸಮಯದಲ್ಲಿ ನಿಜವಾದ ವಿಚಲನವನ್ನು ಸರಿಪಡಿಸಲು ಉಲ್ಲೇಖ ನಿರ್ದೇಶಾಂಕ ನಿಯತಾಂಕಗಳನ್ನು ನಿಜವಾದ ಸಮಯಕ್ಕೆ ಇರಿಸುತ್ತದೆ, ಆದ್ದರಿಂದ ವೆಲ್ಡಿಂಗ್ ನಂತರ ಉತ್ಪನ್ನದ ಸೀಲಿಂಗ್ ಮತ್ತು ಸಮಗ್ರತೆಯನ್ನು ಖಚಿತಪಡಿಸುತ್ತದೆ.
"ನಾಲ್ಕು ಬಿಂದು ಛೇದಕ" ವಿಧಾನ
ಎಲ್ಲರಿಗೂ ತಿಳಿದಿರುವಂತೆ, ಎರಡು ಬಿಂದುಗಳು ನೇರ ರೇಖೆಯನ್ನು ನಿರ್ಧರಿಸುತ್ತವೆ, ಆದರೆ ವರ್ಕ್ಪೀಸ್ ಜೋಡಣೆಯು ಕೋನವನ್ನು ರೂಪಿಸುತ್ತದೆ, ಸಾಂಪ್ರದಾಯಿಕ ಅಲ್ಗಾರಿದಮ್ ಅದರ ಸ್ಥಾನವನ್ನು ನಿರ್ಧರಿಸಲು ಸಾಧ್ಯವಾಗುವುದಿಲ್ಲ, ಇದಕ್ಕೆ ನಾಲ್ಕು ಗಂಟೆಗಳಲ್ಲಿ "ಛೇದಕ" ವಿಧಾನವನ್ನು ಬಳಸಬೇಕಾಗುತ್ತದೆ, ಎರಡು ರೇಖೆಗಳು ಛೇದಿಸುವಾಗ ಛೇದಕ ಬಿಂದುವನ್ನು ಉತ್ಪಾದಿಸುತ್ತದೆ, ತಿಳಿದಿರುವ ನಾಲ್ಕು ಬಿಂದುಗಳ ನಿರ್ದೇಶಾಂಕಗಳ ನಿರ್ಣಯದ ಮೂಲಕ ವಿಶೇಷ ಅಲ್ಗಾರಿದಮ್ ಛೇದಕ ಬಿಂದುವಿನ ಸ್ಥಾನವನ್ನು ಲೆಕ್ಕಹಾಕುತ್ತದೆ ನಿರ್ದೇಶಾಂಕ, ಆದ್ದರಿಂದ ವೆಲ್ಡಿಂಗ್ ಉದ್ದೇಶವನ್ನು ಸಾಧಿಸುತ್ತದೆ.

ಲೇಸರ್ ಸೀಮ್ ಟ್ರ್ಯಾಕಿಂಗ್ ವ್ಯವಸ್ಥೆ
ಲೇಸರ್ ವೆಲ್ಡಿಂಗ್ ಸೀಮ್ ಟ್ರ್ಯಾಕಿಂಗ್ ವ್ಯವಸ್ಥೆಯು ಮುಖ್ಯವಾಗಿ ಲೇಸರ್ ಸಂವೇದಕಗಳು ಮತ್ತು ಮೇಲ್ವಿಚಾರಣಾ ಟರ್ಮಿನಲ್ಗಳಿಂದ ಕೂಡಿದೆ. ಲೇಸರ್ ಸಂವೇದಕವನ್ನು ವೆಲ್ಡಿಂಗ್ ಸೀಮ್ ಮಾಹಿತಿಯ ಸಕ್ರಿಯ ಸ್ವಾಧೀನ ಮತ್ತು ನೈಜ-ಸಮಯದ ಪ್ರಕ್ರಿಯೆಗೆ ಬಳಸಲಾಗುತ್ತದೆ ಮತ್ತು ಕೈಗಾರಿಕಾ ರೋಬೋಟ್ಗಳೊಂದಿಗೆ ನೈಜ-ಸಮಯದ ಸಂವಹನವನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ. ಮಾನಿಟರಿಂಗ್ ಟರ್ಮಿನಲ್ ಸಂವೇದಕಗಳನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡುತ್ತದೆ ಮತ್ತು ಕಾನ್ಫಿಗರ್ ಮಾಡುತ್ತದೆ. ಬುದ್ಧಿವಂತ ವೆಲ್ಡಿಂಗ್ನ ಅಗತ್ಯಗಳನ್ನು ಪೂರೈಸಲು ವೆಲ್ಡಿಂಗ್ ಮಾಡುವ ಮೊದಲು ಸ್ಥಳೀಕರಣ, ಟ್ರ್ಯಾಕಿಂಗ್ ಮತ್ತು ಸ್ಕ್ಯಾನಿಂಗ್ ಕಾರ್ಯಗಳನ್ನು ಸಹ ವ್ಯವಸ್ಥೆಯು ಹೊಂದಿದೆ.
ಕಾರ್ಯನಿರ್ವಹಣಾ ತತ್ವ: ವೆಲ್ಡ್ ಸೀಮ್ ಸ್ಕ್ಯಾನಿಂಗ್, ಪಾಯಿಂಟ್ ಕ್ಲೌಡ್ ಇಮೇಜ್ ಫಿಟ್ಟಿಂಗ್, ಅಲ್ಗಾರಿದಮ್ ವೈಶಿಷ್ಟ್ಯ ಬಿಂದುಗಳನ್ನು ನಿಖರವಾಗಿ ಗುರುತಿಸುತ್ತದೆ ಮತ್ತು ರೋಬೋಟ್ಗೆ ಕಳುಹಿಸಲಾದ ಲೆಕ್ಕಾಚಾರದ ಫಲಿತಾಂಶಗಳ ನೈಜ-ಸಮಯದ ಡೇಟಾವನ್ನು ನಿಯಂತ್ರಣ ಸೂಚನೆಗಳಾಗಿ, ರೋಬೋಟ್ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಮಾರ್ಪಡಿಸುತ್ತದೆ ಅಥವಾ ಮಾರ್ಗದರ್ಶನ ಮಾಡುತ್ತದೆ.
ಸುಕ್ಕುಗಟ್ಟಿದ ಪ್ಲೇಟ್ ದ್ರಾವಣ

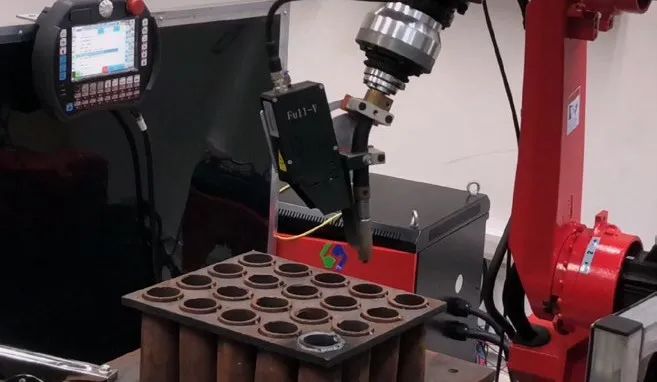
ರೌಂಡ್ ಹೋಲ್ ಸ್ವಯಂಚಾಲಿತ ಪ್ಲಗ್ ವೆಲ್ಡಿಂಗ್ ಪರಿಹಾರ

ವೃತ್ತಾಕಾರದ ಸೀಮ್ ಪರಿಹಾರ

ಟ್ಯೂಬ್ಪ್ಲೇಟ್ ಪರಿಹಾರಗಳು
ಯುನ್ಹುವಾ ಇಂಟೆಲಿಜೆಂಟ್ ತ್ವರಿತ ನಿಯೋಜನೆ, ಸುರಕ್ಷಿತ ಮತ್ತು ಪರಿಣಾಮಕಾರಿ ಯಾಂತ್ರೀಕೃತಗೊಂಡ ಪರಿಹಾರಗಳು ಮತ್ತು ನೈಜ-ಸಮಯದ ಸಿಸ್ಟಮ್ ಪರಿಹಾರಗಳನ್ನು ಒದಗಿಸಬಹುದು. ಲೇಸರ್ ವಿಷನ್ ವೆಲ್ಡಿಂಗ್ ಸೀಮ್ ಟ್ರ್ಯಾಕಿಂಗ್ ವ್ಯವಸ್ಥೆಯು ವೆಲ್ಡಿಂಗ್ ರೋಬೋಟ್ಗೆ ನೈಜ-ಸಮಯದ ವೆಲ್ಡಿಂಗ್ ಸೀಮ್ ಲೊಕೇಟಿಂಗ್ ಮತ್ತು ಟ್ರ್ಯಾಕಿಂಗ್ ಅನ್ನು ಅರಿತುಕೊಳ್ಳಲು ಮತ್ತು ವೆಲ್ಡಿಂಗ್ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ವೆಲ್ಡಿಂಗ್ ಸೀಮ್ ಆಫ್ಸೆಟ್ಗೆ ಅನುಗುಣವಾಗಿ ವೆಲ್ಡಿಂಗ್ ಪಥವನ್ನು ಸರಿಪಡಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ, ಇದರಿಂದಾಗಿ ನಿಜವಾದ ಬುದ್ಧಿವಂತ ವೆಲ್ಡಿಂಗ್ ಅನ್ನು ಅರಿತುಕೊಳ್ಳಬಹುದು.
ಪೋಸ್ಟ್ ಸಮಯ: ಏಪ್ರಿಲ್-09-2022



